Our paper entitled “A Secure Control Design for Networked Control System with Nonlinear Dynamics under False-Data-Injection Attacks” has been accepted for publication by IEEE American Control Conference (ACC) 2021. The presentation is scheduled from 10:42 AM to 10:45 AM on Thursday, May 27, 2021.
Abstract:
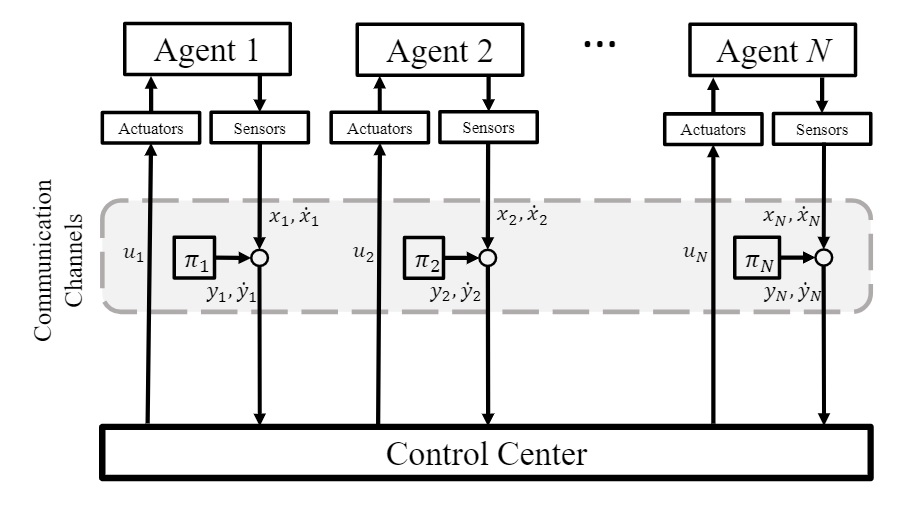
In a centralized Networked Control System (NCS), all agents share local data with a central processing unit that generates control commands for agents. The use of a communication network between the agents gives NCSs a distinct advantage in efficiency, design cost, and simplicity. However, this benefit comes at the expense of vulnerability to a range of cyber-physical attacks. Recently, novel defense mechanisms to counteract false data injection (FDI) attacks on NCSs have been developed for agents with linear dynamics but have not been thoroughly investigated for NCSs with nonlinear dynamics. This paper proposes an FDI attack mitigation strategy for NCSs composed of agents with nonlinear dynamics under disturbances and measurement noises. The proposed algorithm uses both learning and model-based approaches to estimate agents’ states for FDI attack mitigation. A neural network is used to model uncertain dynamics and estimate the effect of FDI attacks. The controller and estimator are designed based on Lyapunov stability analysis. A simulation of robots with Euler-Lagrange dynamics is considered to demonstrate the developed controller’s performance to respond to FDI attacks in real-time.
Cite:
A. Sargolzaei, “A Secure Control Design for Networked Control System with Nonlinear Dynamics under False-Data-Injection Attacks”, American Control Conference, IEEE, 2021.