Our recent paper entitled “A Neural Adaptive Approach for Active Fault-Tolerant Control Design in UAV” published by IEEE Transactions on Systems, Man, and Cybernetics: Systems.
Abstract:
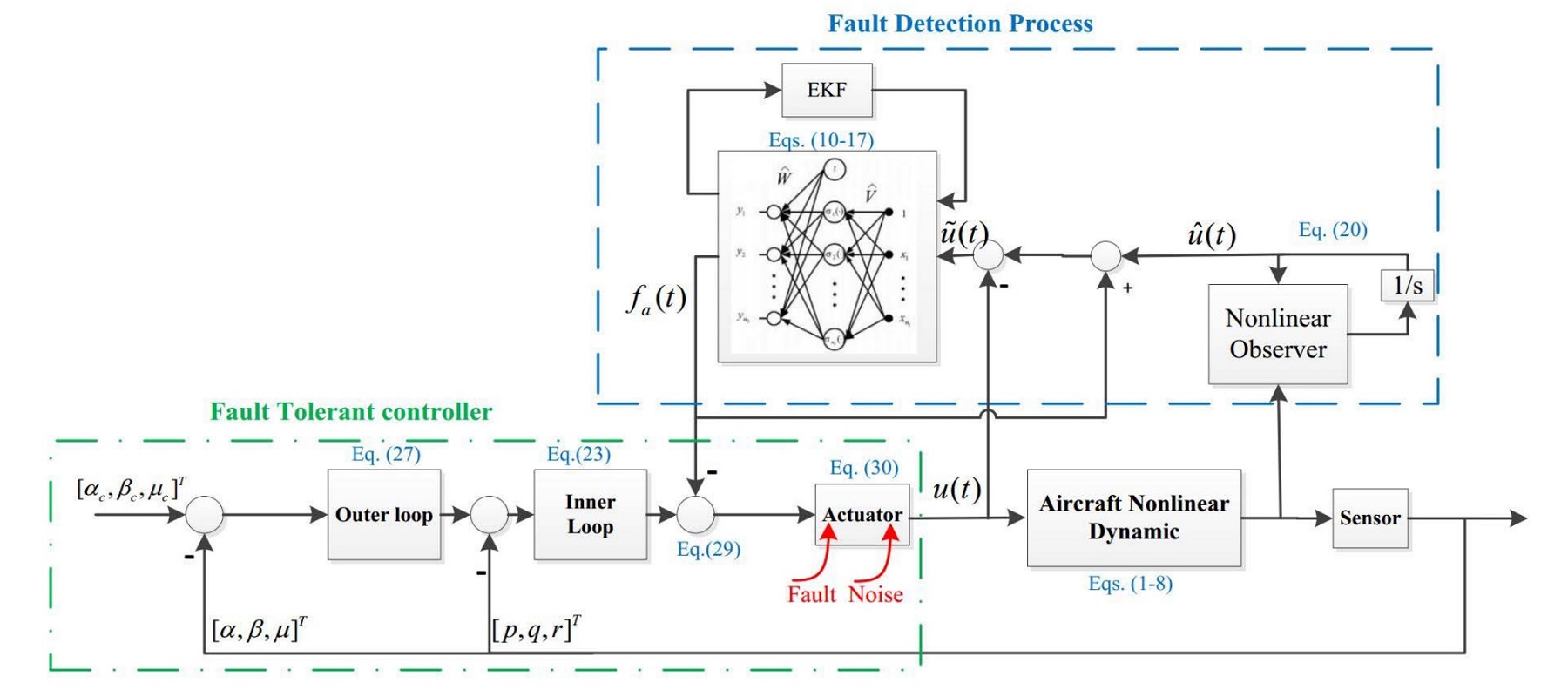
Faults in aircraft actuators can cause serious issues in safety. Due to the autonomous nature of the unmanned aerial vehicles (UAVs), faults can lead to more serious problems in these systems. In this paper, a new active fault tolerant control (FTC) system design for an UAV is presented. The proposed design uses a neural network adaptive structure for fault detection and isolation (FDI), then, the FDI signal combined with a nonlinear dynamic inversion technique is used to compensate for the faults in the actuators. The proposed scheme detects and isolates faults in the actuators of the system in real-time without the need of controller reconfiguration in presence of faults in the actuators. The simulation results of the designed FTC system when it is applied to WVU YF-22 UAV show that the proposed design can successfully detect and isolate the faults and compensate for their effect.